SentryNode Edu
A real robot platform for your first step into robotics.
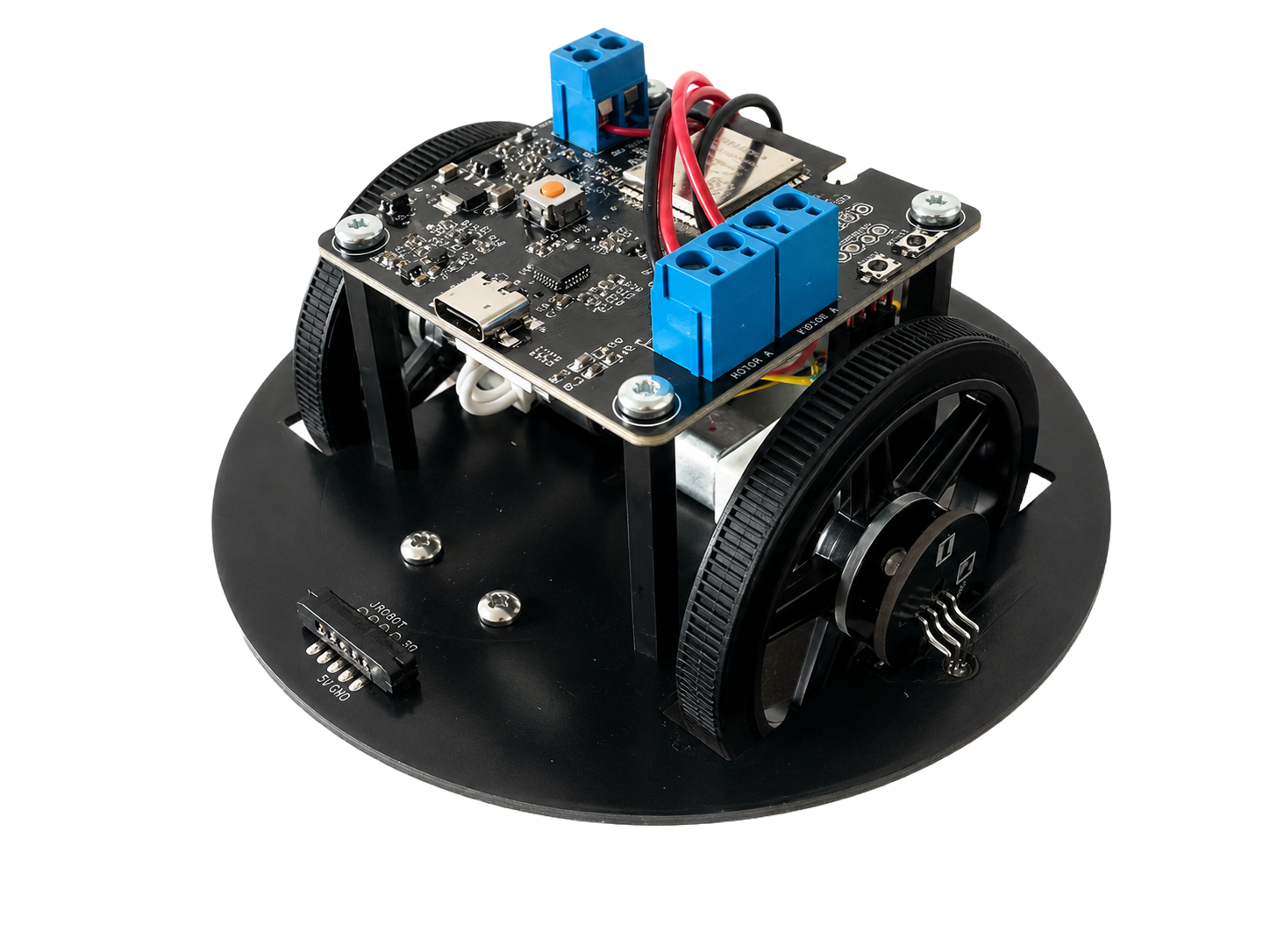
SentryNode Edu is an ESP32-powered robot kit with everything students need to start building, programming, and experimenting — without the usual complexity.
Designed for education
Classroom tested
Loved by teachers & makers
How it works
Three steps from unbox to your first behavior.
1
step one
Assemble & connect
Simple assembly. Connect the battery and you're ready to go.
unbox · clip · power on
2
step two
Program with blocks
Use SentryNode Pilot to build movement, sensor logic, and autonomous behavior.
⋮⋮
Straight
0.5, 1
×
⋮⋮
Turn
Left, 0.5
×
3
step three
Go deeper with code
Switch to firmware and extend the platform for custom projects and research.
void loop() { if (line) turn(40); else fwd(70); }
SentryNode Pilot companion app
Program and control the robot visually with the companion app.